现代社会,电力的应用已经渗透到了居民生活的各个方面,而电力资源主要集中在人迹罕至的区域,要将电力资源充分地利用就需要进行远距离输电,所以输电线路在电力系统中具有十分重要的作用。
随着无人科技和计算机技术的飞速发展,我们可以通过无人机及无人船搭载的成像设备获取到输电线路的图像数据,进而通过图像处理技术分析出输电线路上的安全隐患。
XOCEAN同时使用无人船(USVs)和无人机(UAVs)在苏格兰大陆和西部群岛之间完成了35次电缆检测调查。该项目地理分布广泛,作业地点在北纬55°至58°之间的25个不同岛屿上。无人机(UAVs)在低潮时飞行测量,无人船(USVs)在高潮位时测量,获得最高分辨率的陆地/海底无缝拼接三维数据。该项目已经在周六时间内完成。
两艘无人船被用来完成调查任务:X-04(型号:XO-450)和Harry 无人船(USV)。X-04是一艘4.5米长的双体船,由5MaH电池供电,由一台每天仅使用9升柴油的小型柴油发电机充电。Harry是一艘船体长2.5米,仅由3MaH电池供电。X-04用于探测暴露较深、较长的电缆,而USV Harry则用于探测非常浅、较容易接近的电缆。
Harry USV使用R2Sonic 2020多波束测深仪和ApplanixPOS MV IMU,无人船均使用了Valeport swift和QPS/QINSY来获取数据,并向无人船的自动驾驶仪提供信息,以引导他们沿着调查线行驶。此次多波束系统同时采集了水深、背向反射和侧扫数据。

两架senseFly eBee X无人机,一架装备有S.O.D.A 3D摄像机,一架装备有AeriaX摄像机,用于获取地形数据。利用QPS Qimera SfM折射算法,从极浅水域的无人机数据集提取了水深,使其能够与USV的水深匹配。两种照相机设计纯粹用于无人机使用并且分别有20毫安和24毫安。来自无人机的数据集使用POS PPK定位图像,然后使用Pix4D Mapper处理。
USV是用拖车运输的,这意味着它从一个岛移动到另一个岛非常快,最重要的是,它们不像传统的测量船那样受天气的影响。这也是通过使用非常少的燃料(仅使用4x4油料)实现的。USV可以部署在有保护的电缆上,这意味着该项目几乎不受天气停机的影响,特别是考虑到它是在冬天进行的。

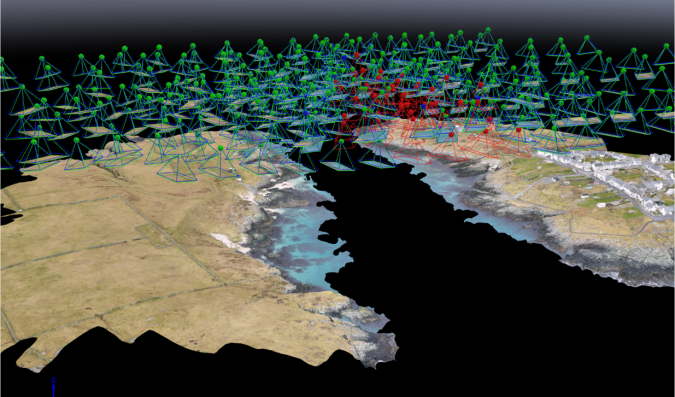
如果时间和条件允许,无人机(UAV)可以无人船(USV)前面飞行。无人机数据会被快速处理生成正射影像和LAS文件,以显示无人机数据覆盖的范围,但更重要的是,无人机可以提前提示浅水区,无人船可以避危险区域。UAV在一个航次中需要飞行两个高度:119米和75米,这两组图像数据被结合起来以获得最高的分辨率,较高的飞行距离用于提供纵向重叠,以确保软件能够识别足够的关键点匹配。如果eBee X无人机使用新的耐久电池,在良好条件下无人机可以飞行大约1小时15分钟,如果在12m/s的风速中以最大速度飞行可达40分钟。如果在移动电话范围内,RTK修正将实时传输给无人机。这不仅可以实现准确快速的处理,而且也可以让eBee X更容易着陆,特别是在起伏的地形上,或者从近海着陆到悬崖的陆地上。
一旦采集到无人机(UAV)数据,它将进行三个阶段的后处理流程:
1.senseFly’s eMotion软件对GNSS和IMU原始数据进行后处理;
2.带有地理标记的图像加载到一个新的Pix4D项目里;
3.LAS文件被加载到QPS Qimera,与USV多波束数据进行无缝匹配。
如果电缆埋在陆地上,可以使用无线电探测装置来确定电缆的位置和埋深。许多电缆都是30多年前铺设的,之前给定的位置往往是不正确的,利用这些信息和无人机的数据,测量人员对电缆在水下的位置有了更好的了解。
无人船(USV)是在水深停止警报开启的情况下工作的,这意味着如果水深过浅,无人船(USV)将停止工作,返回到安全水深,等待陆上无人机(USV)飞行员指示下一步该做什么。在测量过程中,由于最浅的部分与海岸平行,且总是在之前的覆盖范围内,因此该特征没有被应用,这确保了作业的安全性和数据的高质量。USV飞行员还可以通过USV上的摄像头获得实时360度视觉,AIS系统被集成到每艘USV的QINSy导航显示器和XO-450 网络主机中。
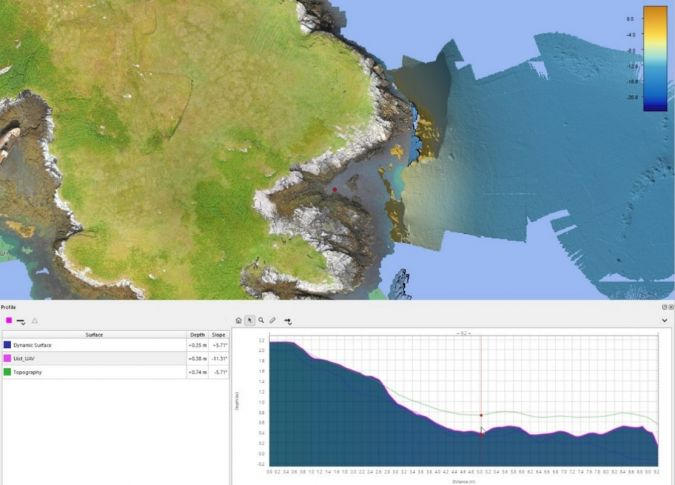
电缆RPL用作无人船(USV)跟随的初始调查线,这样会输出一个方位交叉航线到无人船(USV)的自动导航装置中,无人船(USV)操作员调整无人船的速度,并保持警戒,无人船按照测量计算机的引导下沿着直线航行,在完成RPL和两边至少两条测量测线后,无人船(USV)沿着与海岸平行的航线行驶。当沿着平行线航行时,QPS QINSY AutoSwath函数将根据之前的多波束条带范围绘制了一条线,使用110%的重叠,以确保USV覆盖始终位于之前调查的数据之上,在线测量员一直在监测实时DTM彩色地图,当它达到特定值时就变成蓝色。蓝色基本上是USV的安全轮廓,使数据收集既安全又有效。
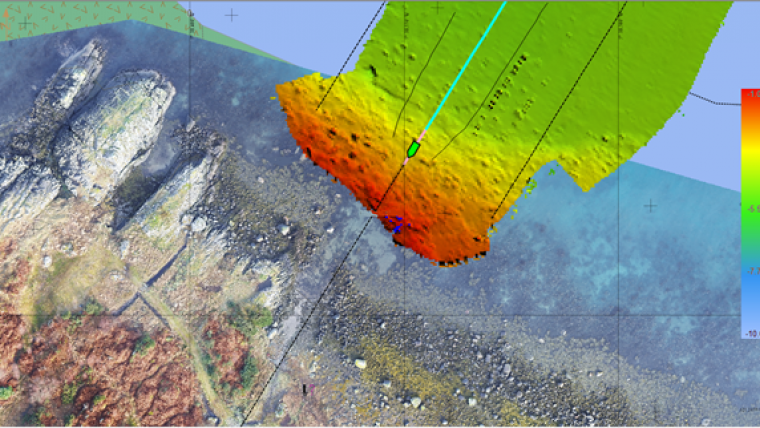
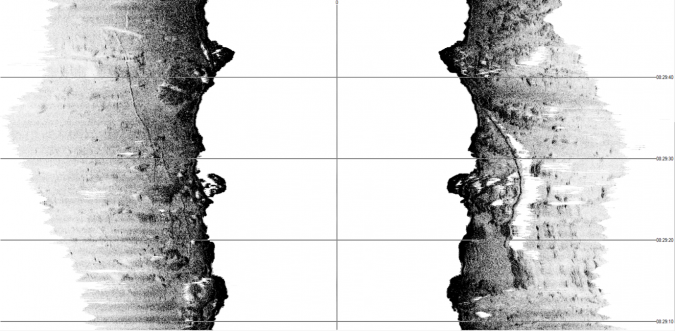
仅从测深角度来看,实时探测电缆非常具有挑战性,因为地形本身是岩石,而且在较浅的区域也有大量的海带(海草)。然而,事实证明:使用R2Sonic多波束系统的侧扫功能是非常有效的,当电缆距离与电缆设计距离很远时,USV可以通过查看侧扫图像来引导电缆。
无人船(USV)的多波束数据被导入到同一QPS Qimera项目,并独立处理。声速数据被也加载到采集软件中。
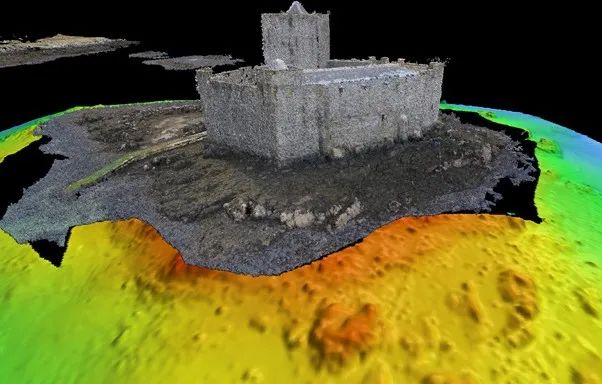
利用处理后的多波束数据和无人机文件创建一个动态的DTM曲面,在数据处理中,可以同时查看两个数据集(多波束和无人机数据),要么按文件着色,要么(最好)按RGB着色,这就会得到一个逼真的无人机数据点云和已经被着色成白色的USV多波束数据,使得调查人员在浪溅带可以清晰的分辨出什么是岩石,什么是噪声。
根据最终处理好的数据,将发现的电缆进行数字化处理,并标示电缆附近或电缆上的岩石和海底特征,为每条线缆编写完整的报告,包括GIS、图表、最终的RPL和事件清单。
使用无人船(USVs)和无人机(USAs)开展线缆调查项目,不仅能够获得最高分辨率的数据,还确保了调查的安全性和高效性。在6周内,70次无人机(UAV)飞行和35次无人船(USV)是一次非凡的成就,足以证明XOCEAN的无人化技术非常适合这类的调查,它还证明在浅水区域,多波束系统中的侧扫图像和固定式安装的传统侧扫具有同等效果,且与拖曳式侧扫相比,不受水深、洋流和海草等安全因素的影响。
